Montaje brazo robtótico. Mecánica.
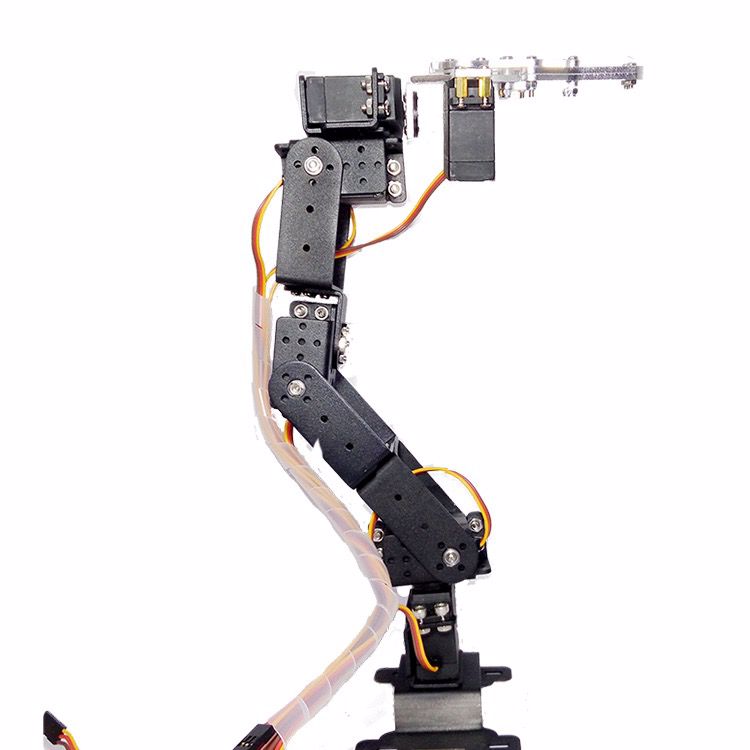
Vamos a ver, paso a paso, cómo montar un brazo robótico de seis ejes.
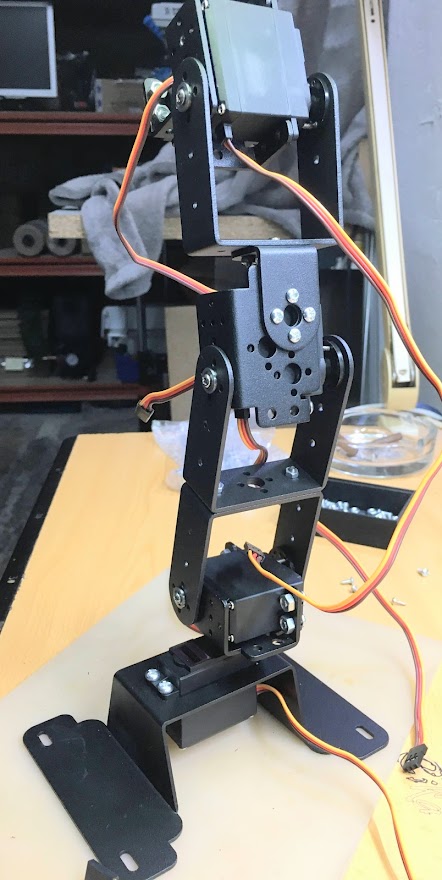
Tenemos movimiento de rotación sobre el eje vertical con el que podemos dirigir la «mirada» del brazo hacia cualquier dirección.
Otro eje se encarga de levantar el brazo, «ponerlo de pie».
El tercer eje hace un «movimiento de cadera», podemos hacer que el brazo se incline hacia delante.
El cuarto y el quinto eje se encargan del movimiento de la «muñeca», arriba y abajo, rotación izquierda y derecha.
Por último, el sexto eje se encarga de abrir y cerrar la mano.
El kit de montaje viene con tres piezas en U, cuatro soportes para los servos, la base del sistema, una pieza en L y la garra. También se incluye todo tipo de tornillería, hay tronillos de sobra para que trabajemos a gusto.

NOTA. Todos los servos incluidos en el kit tienen un tope en el recorrido del eje. Es importante que cuando vayamos colocando cada uno de los servos, comprobemos que el eje se encuentra a mitad de su recorrido. Podemos mover el eje con la mano usando una palanca de las que vienen en los accesorios del servo y haciéndolo girar.
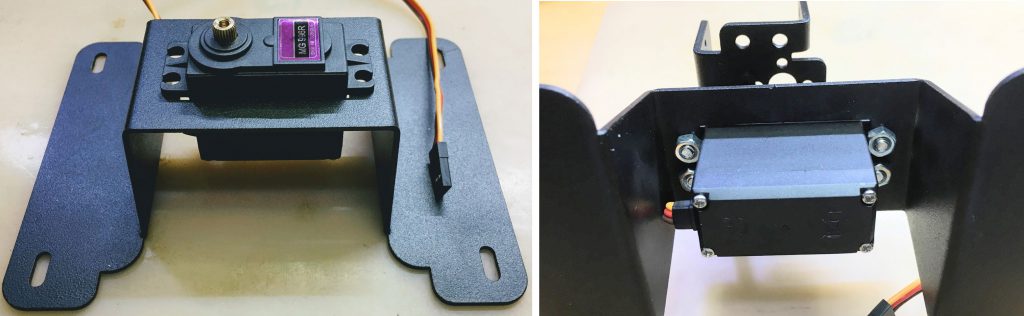
El primer paso será colocar uno de los seis servos sobre la plataforma de la base. Simplemente lo colocamos en la parte superior y lo atornillamos con cuatro tornillos y sus correspondientes tuercas.
En este servo colocaremos uno de los discos metálicos que servirá de soporte para el resto de la estructura.
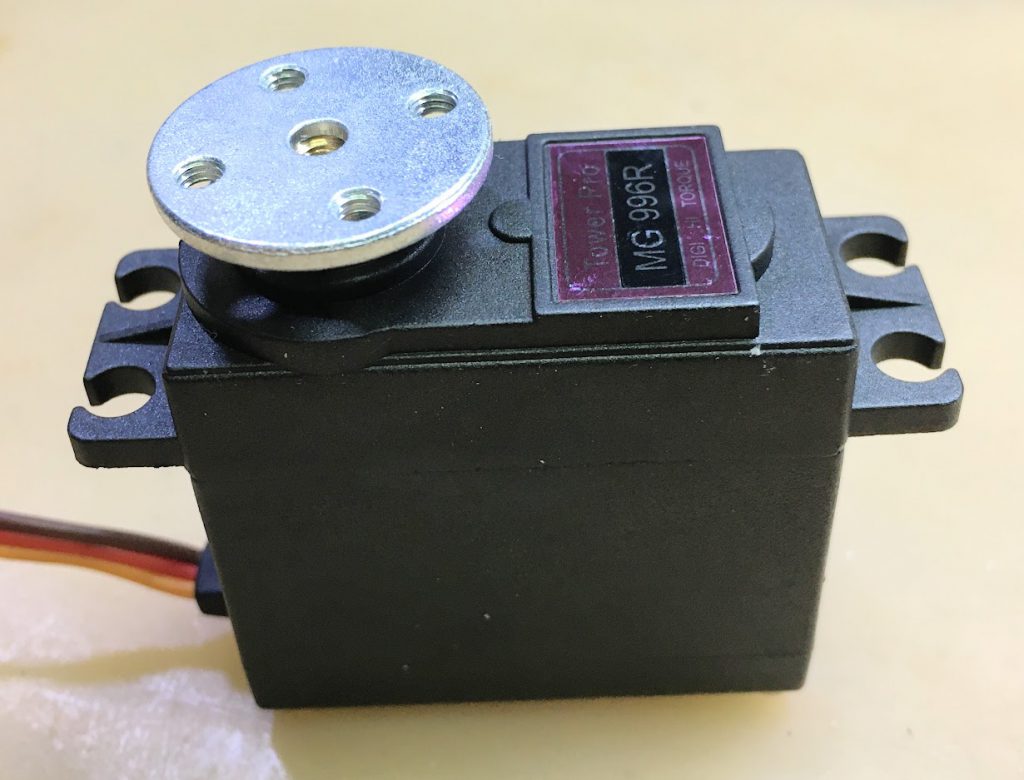
Atornillamos el disco por su orificio central y colocamos sobre él uno de los cuatro soportes de los servos incluidos en el kit.
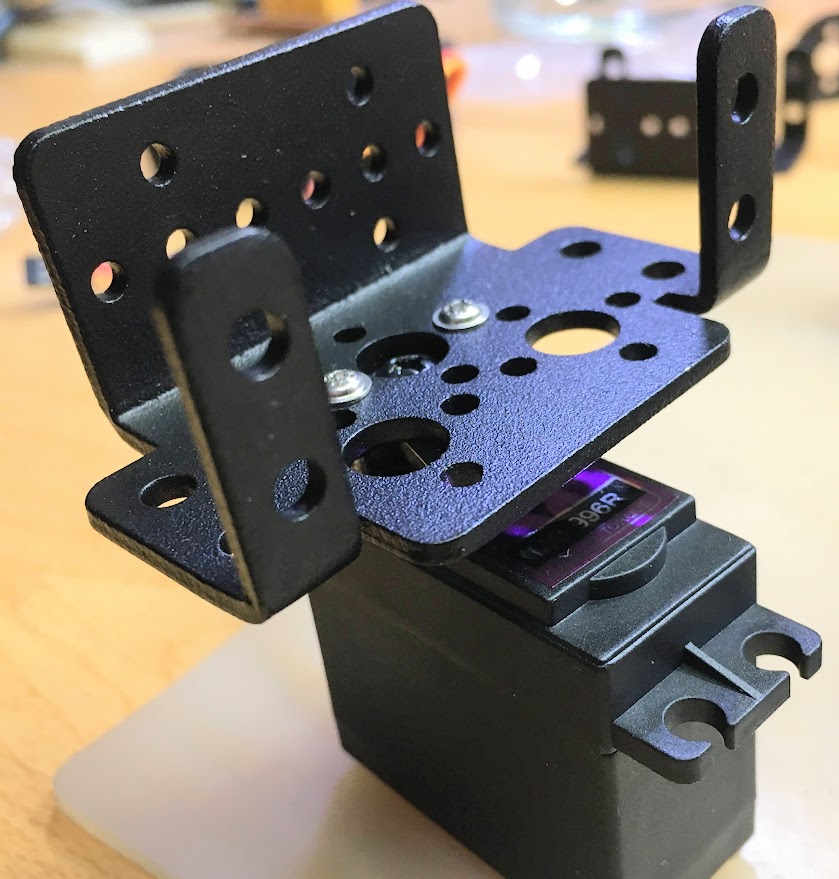
El montaje queda como se muestra en la imagen
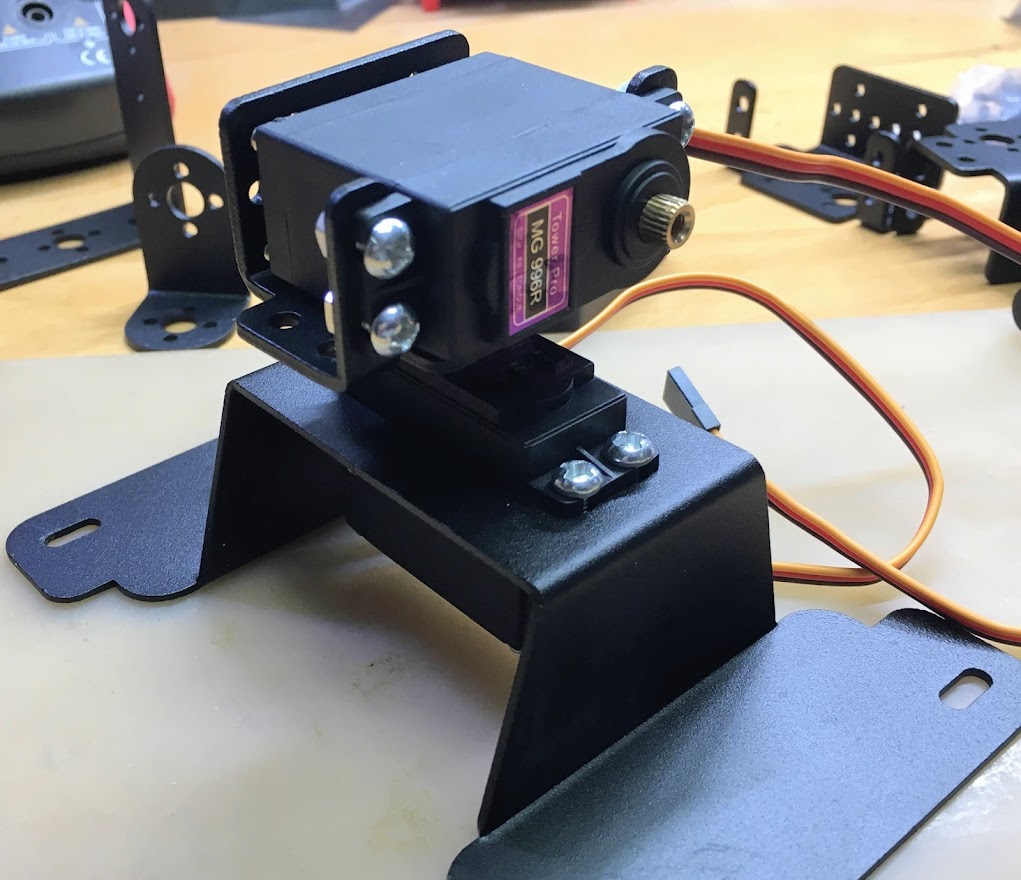
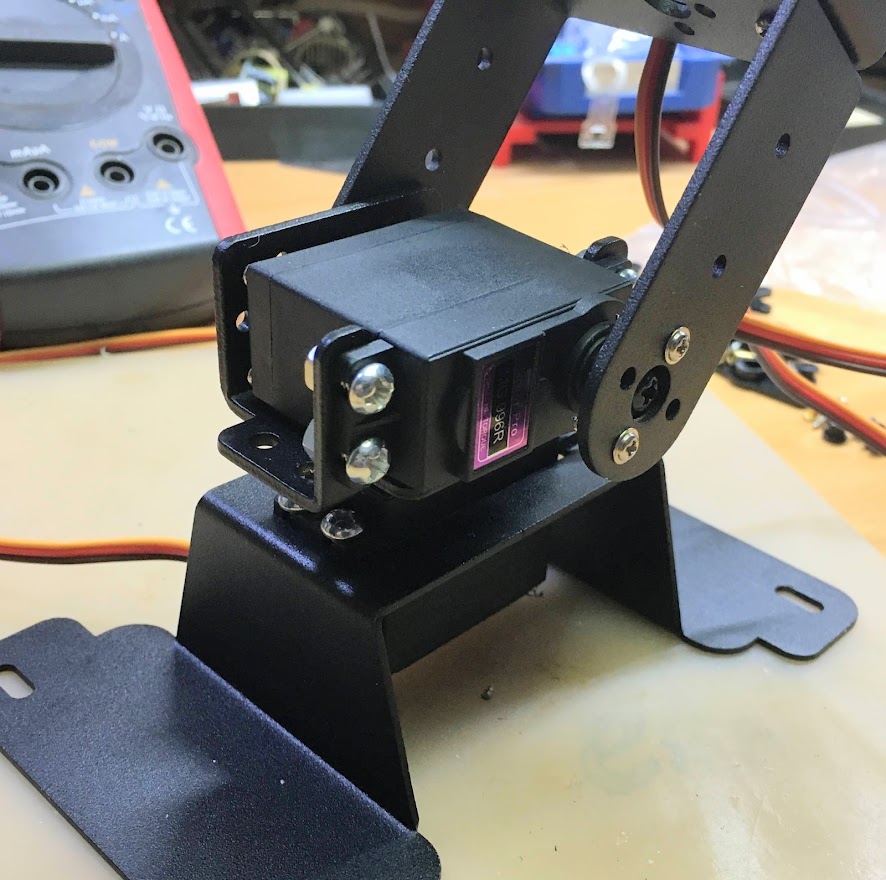
Seguimos insertando uno de los servos en el soporte anterior. Lo sujetamos al soporte con cuatro tornillos y sus tuercas.
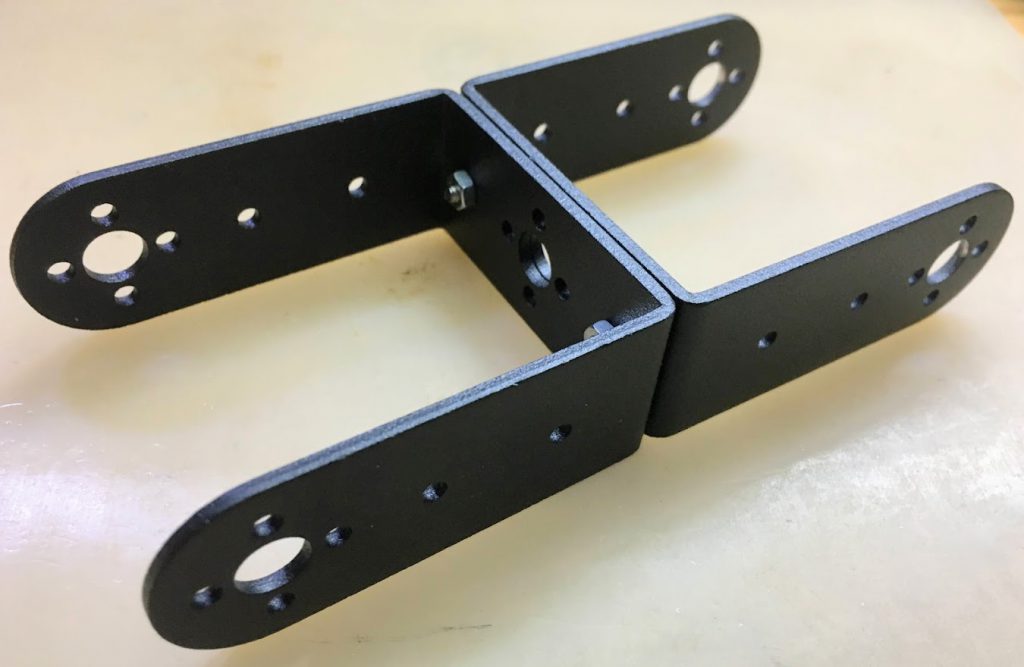
Por otra parte, unimos dos de las piezas en U con dos tornillos.
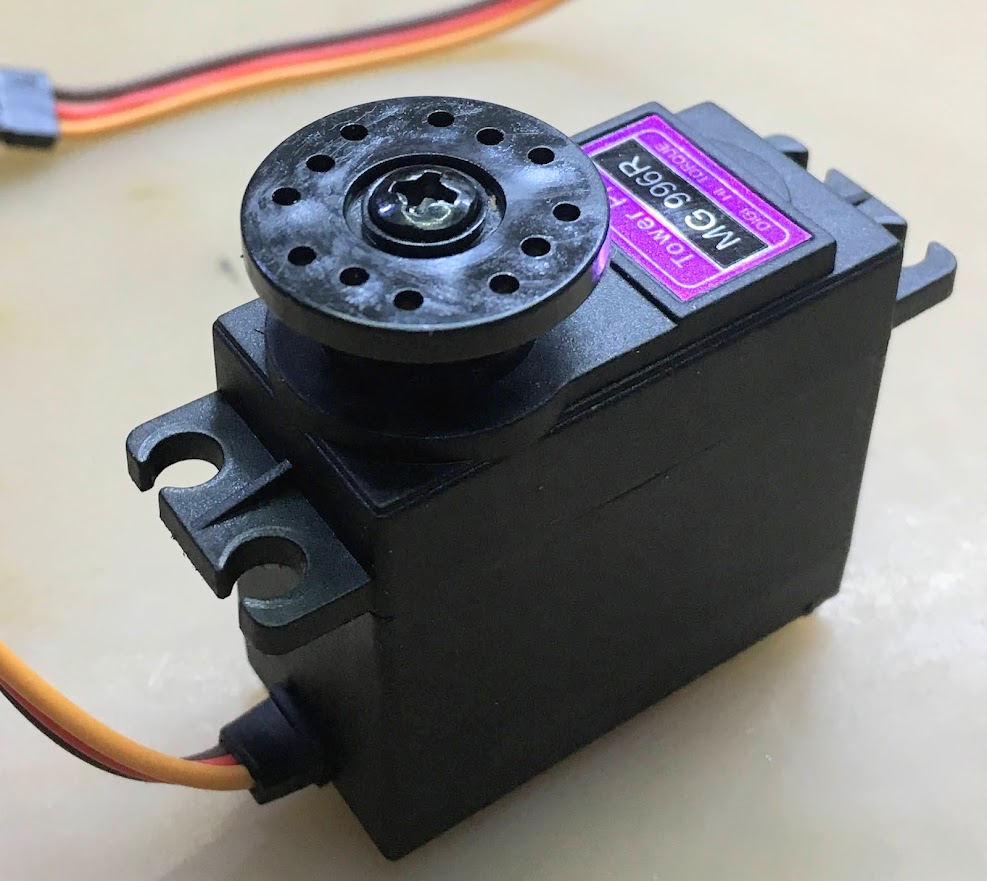
Ahora colocamos un disco de plástico sobre uno de los servos. Este disco viene en los accesorios incluidos en cada servo. El resto de accesorios sobran.
Y un rodamiento en una de las piezas en U que hemos unido anteriormente
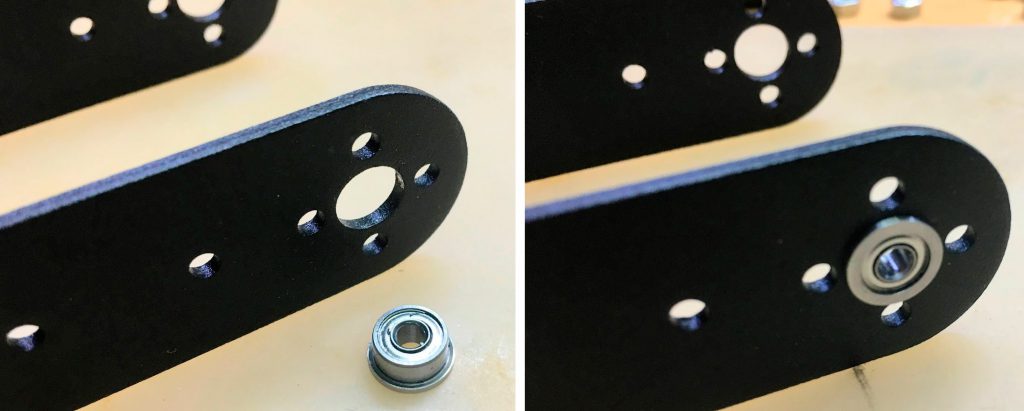
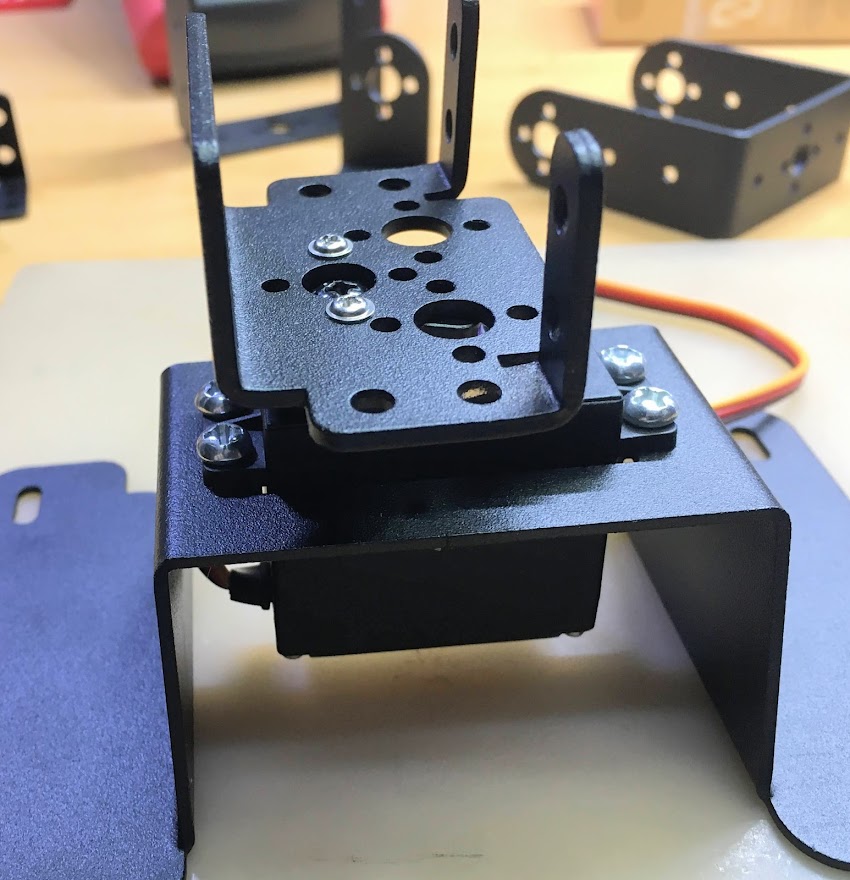
Pasando un tornillo a través del rodamiento colocamos uno de los soportes de los servos
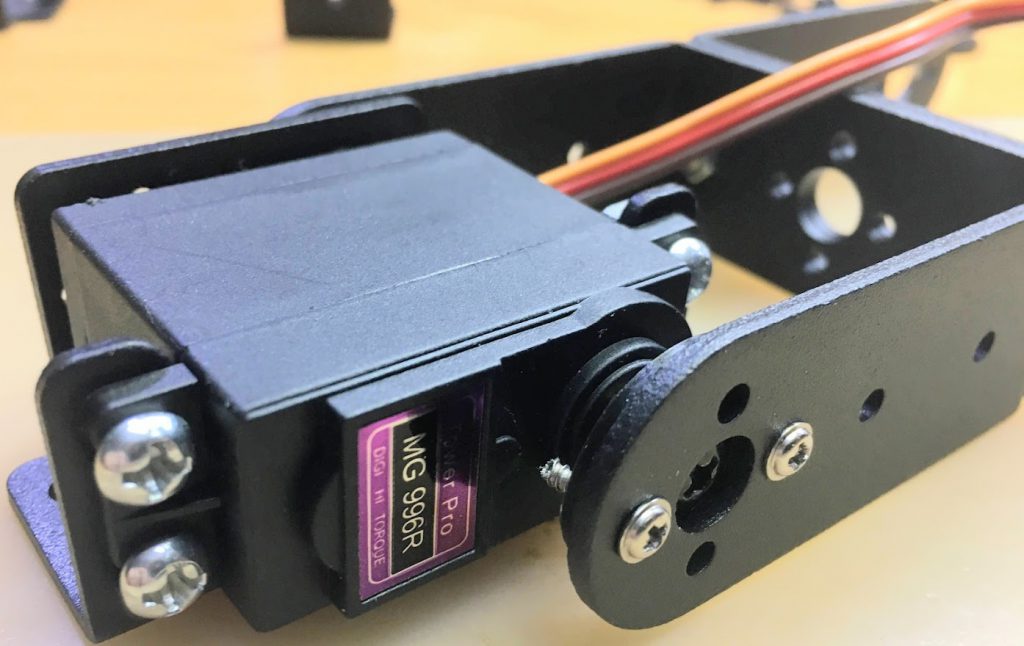
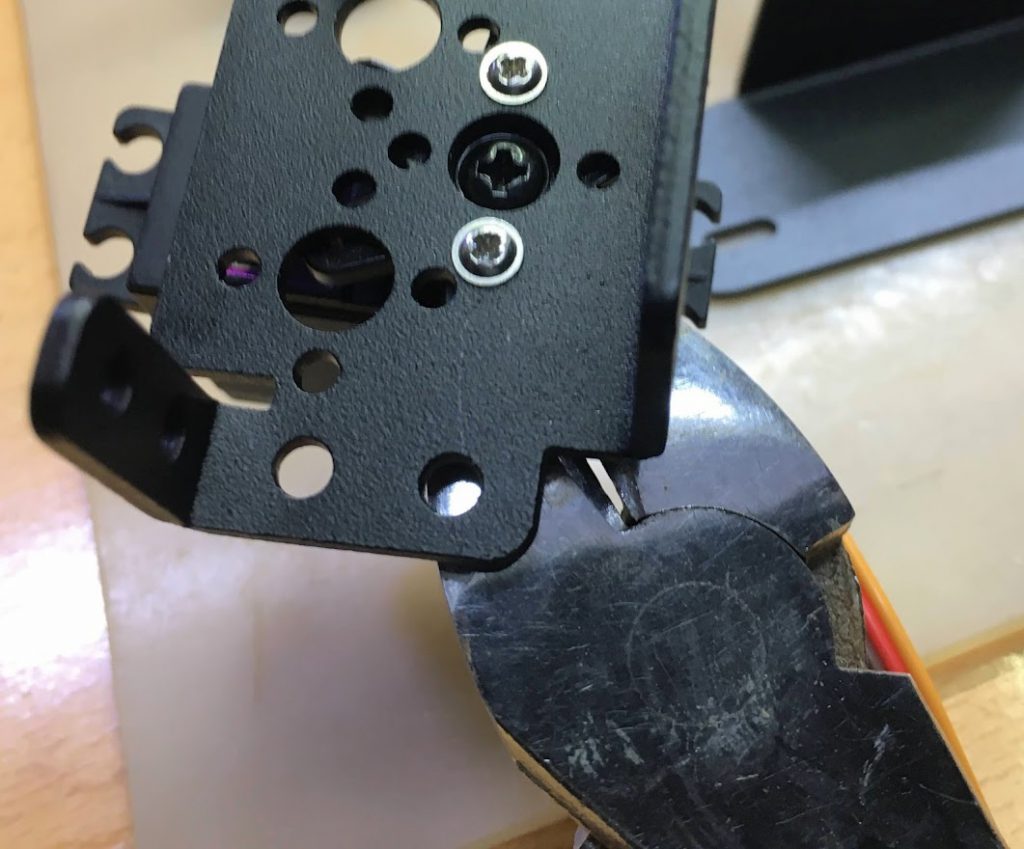
y colocamos el servo anterior en este soporte. Atornillamos el servo al soporte con cuatro tornillos y el disco de plástico a la pieza en U. Notar que los tornillos que vienen en los accesorios del servo para fijar el disco son de uso general, en este caso son demasiado largos y hay que cortarlos con unos alicates de corte.
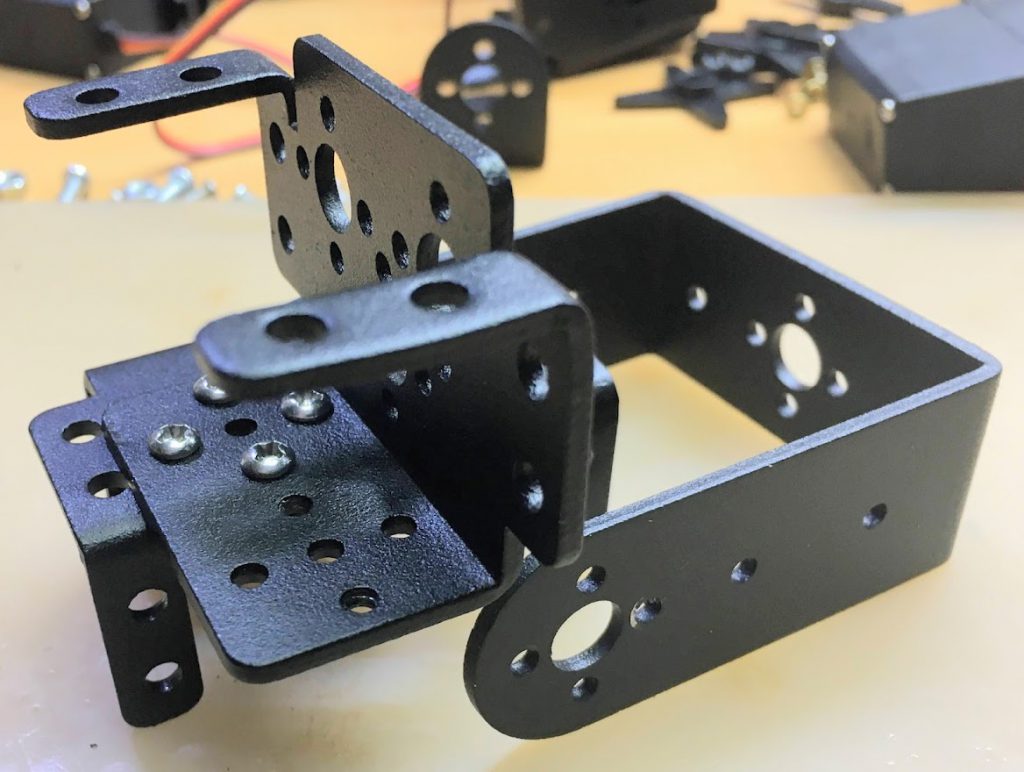
Ahora, por otro lado, repetimos el montaje anterior con la última de las piezas en U, pero añadimos un segundo soporte para servo como se muestra en la figura.
y colocamos un servo
y el otro
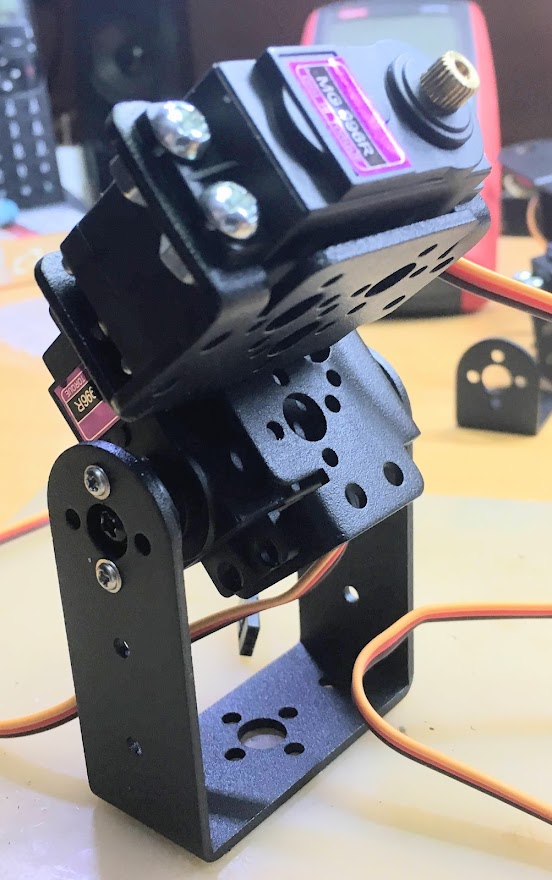
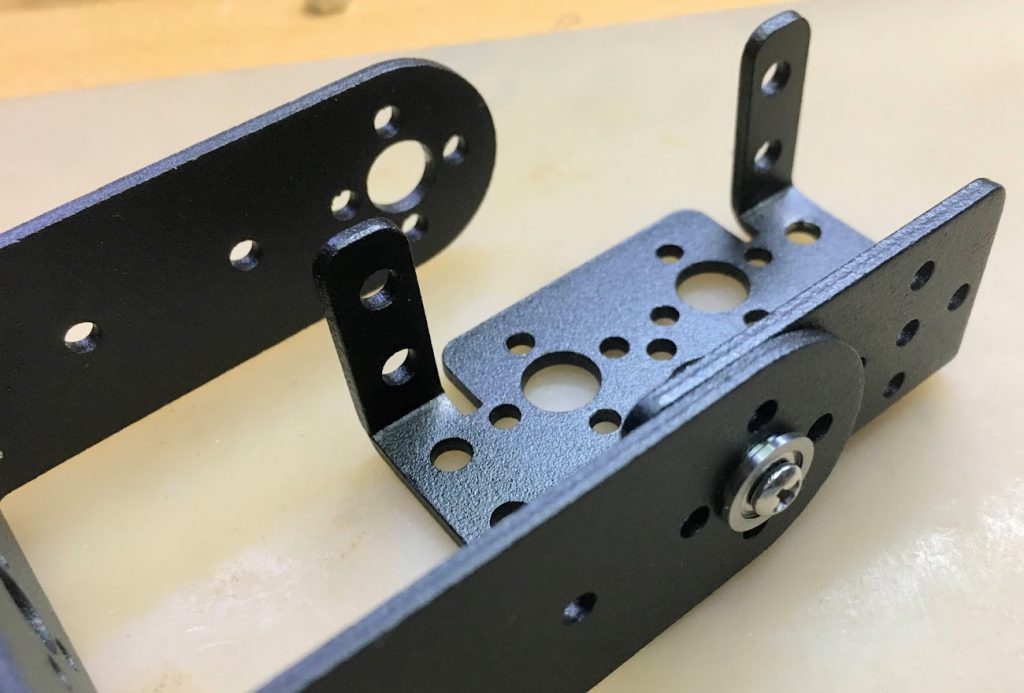
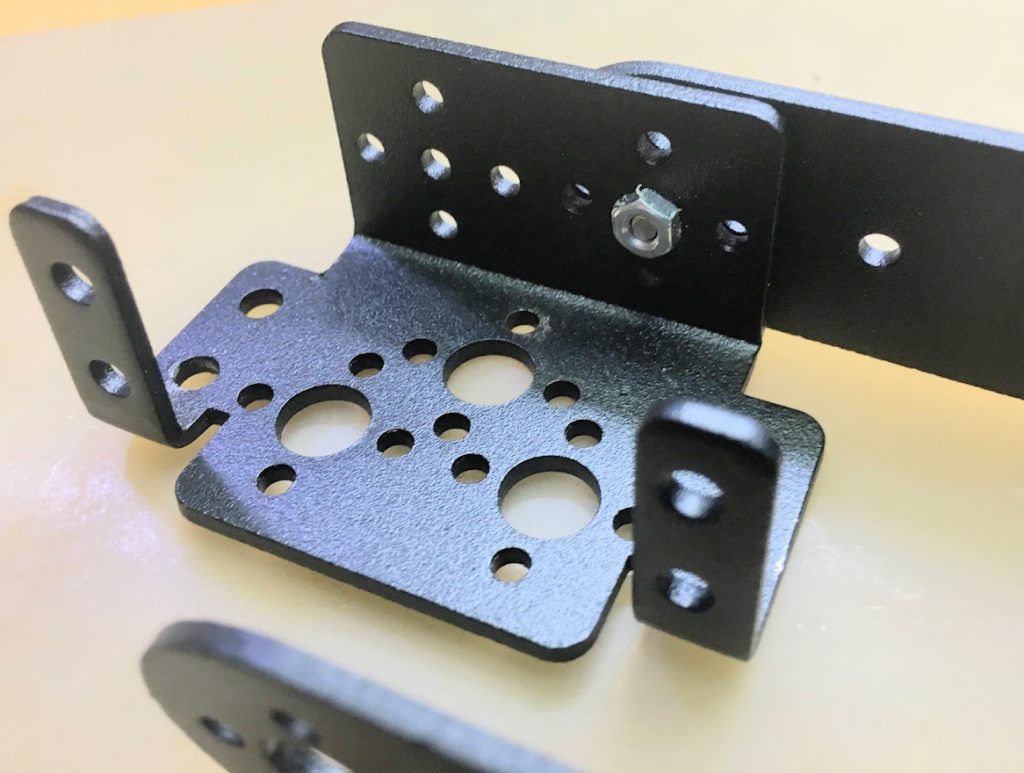
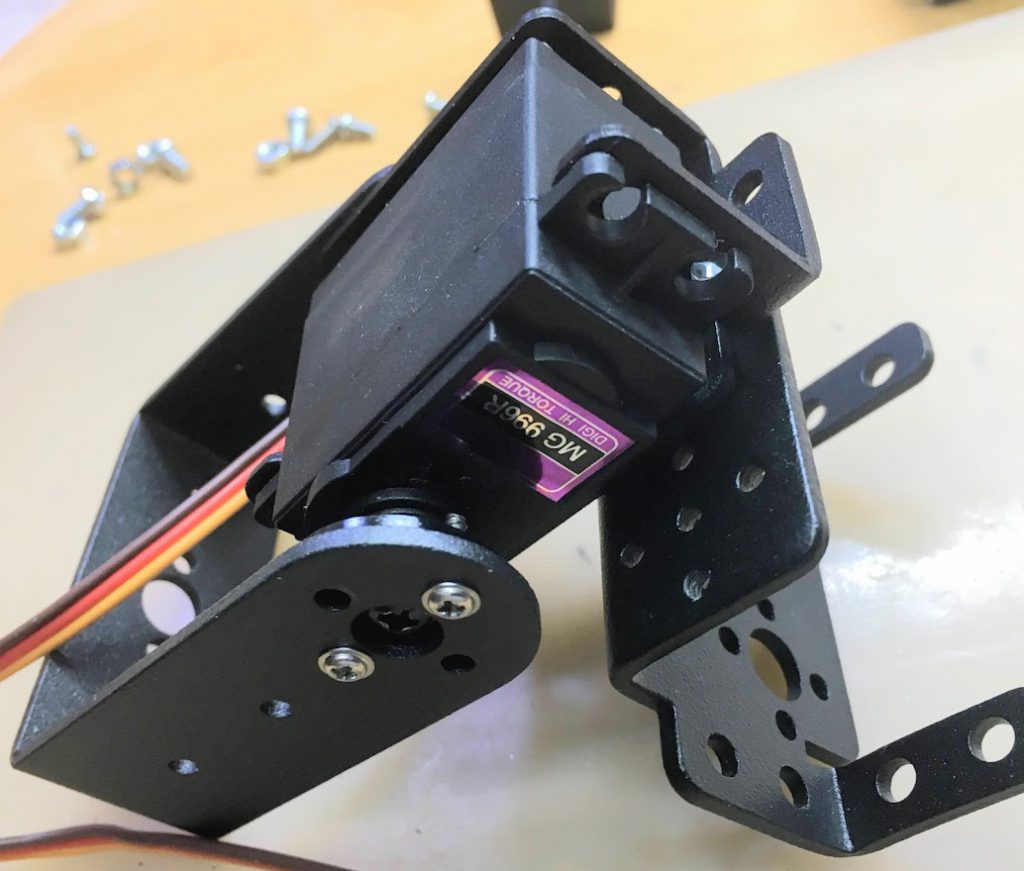
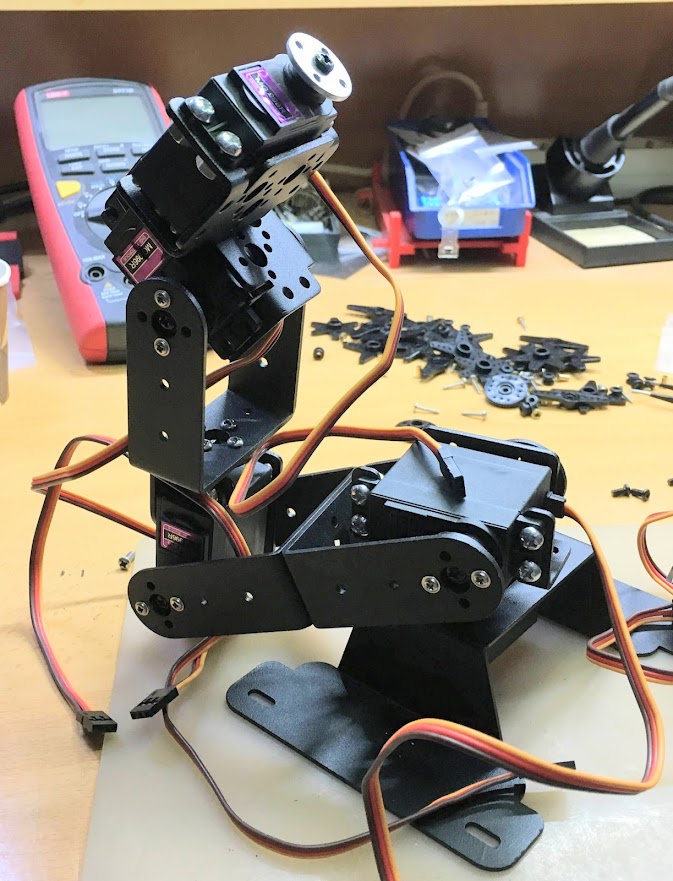
A continuación montamos el bloque que contiene las dos piezas en U sobre el servo de la plataforma base. Usaremos un disco de plástico y un rodamiento, como hemos visto anteriormente.
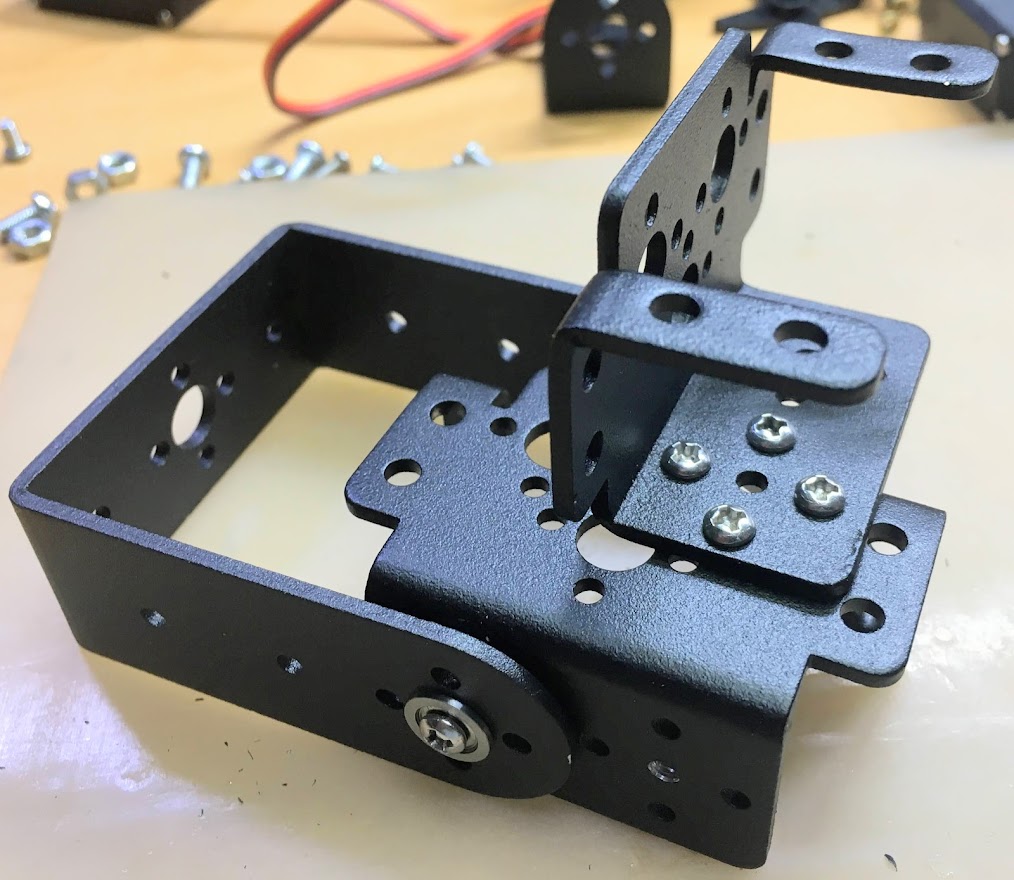
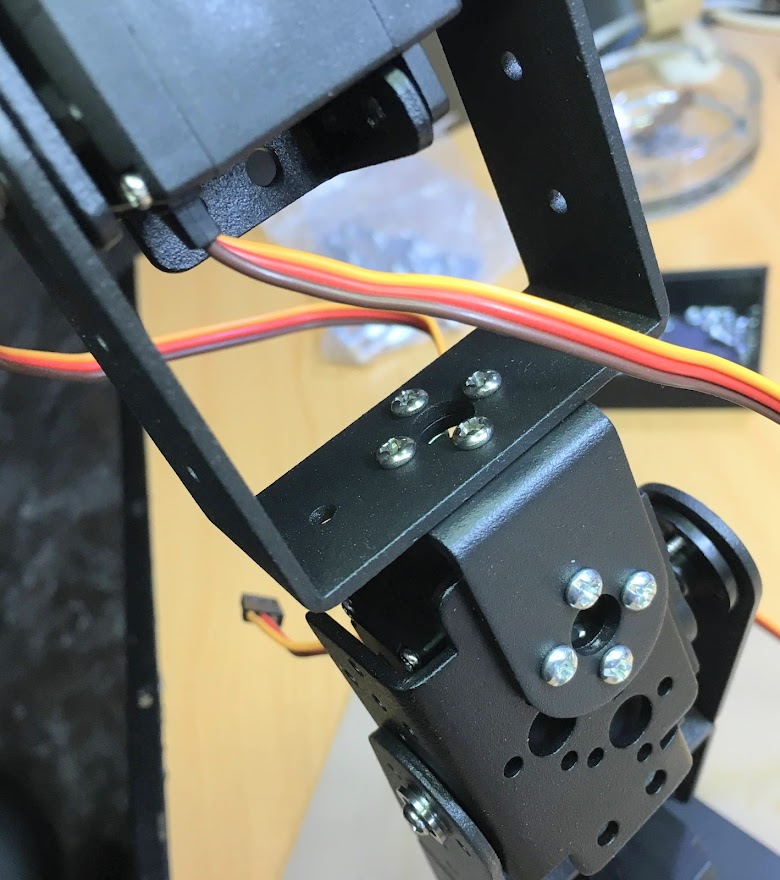
Y unimos el bloque de las dos piezas en U con el bloque de una pieza en U usando la pieza en L
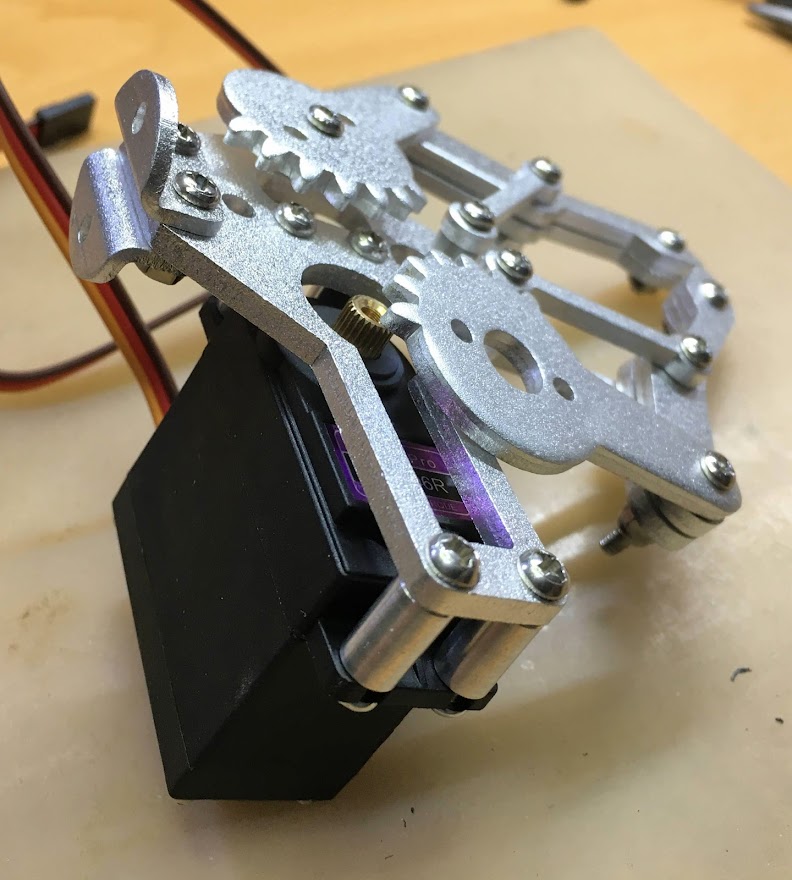
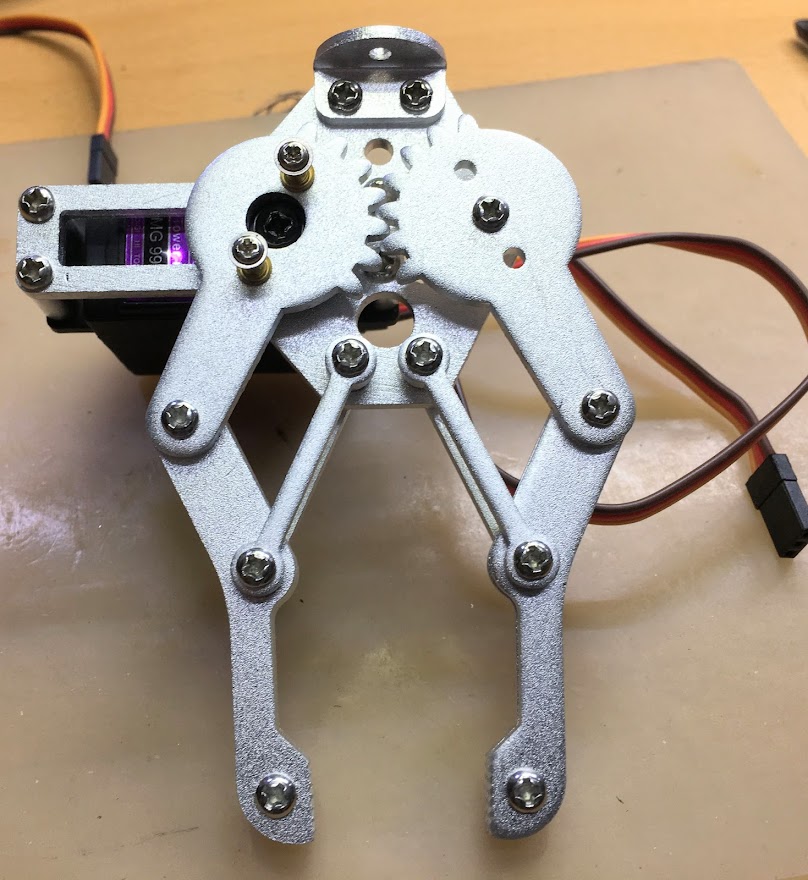
Ya tenemos nuestra estructura terminada. Por último vamos a centrarnos en la garra. Esta viene premontada y lo único que tenemos que hacer es colocarle el servo que hará que abra y cierre. Lo sujetamos a la garra con cuatro tornillos, tal como se muestra en la imagen.
Ahora insertamos un disco de plástico en el eje del servo.
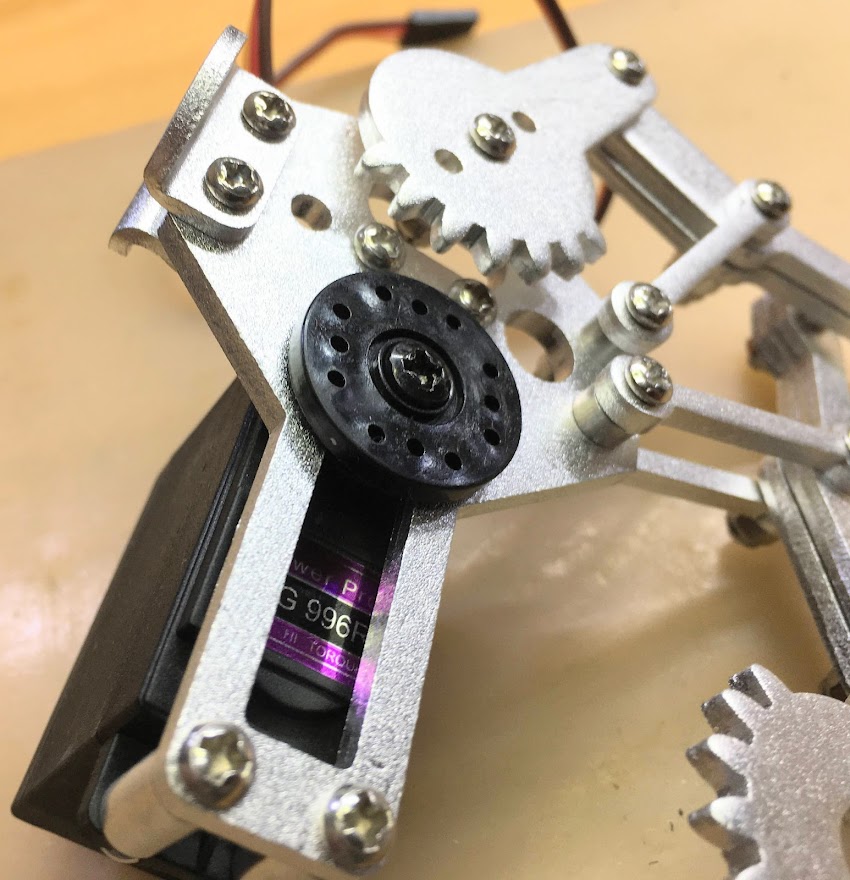
y sujetamos la pieza metálica de la garra sobre el disco. Para ello usamos dos de los tornillos que vienen en los accesorios del servo usando dos separadores para que el tornillo no roce con la pieza metálica que está debajo del disco.

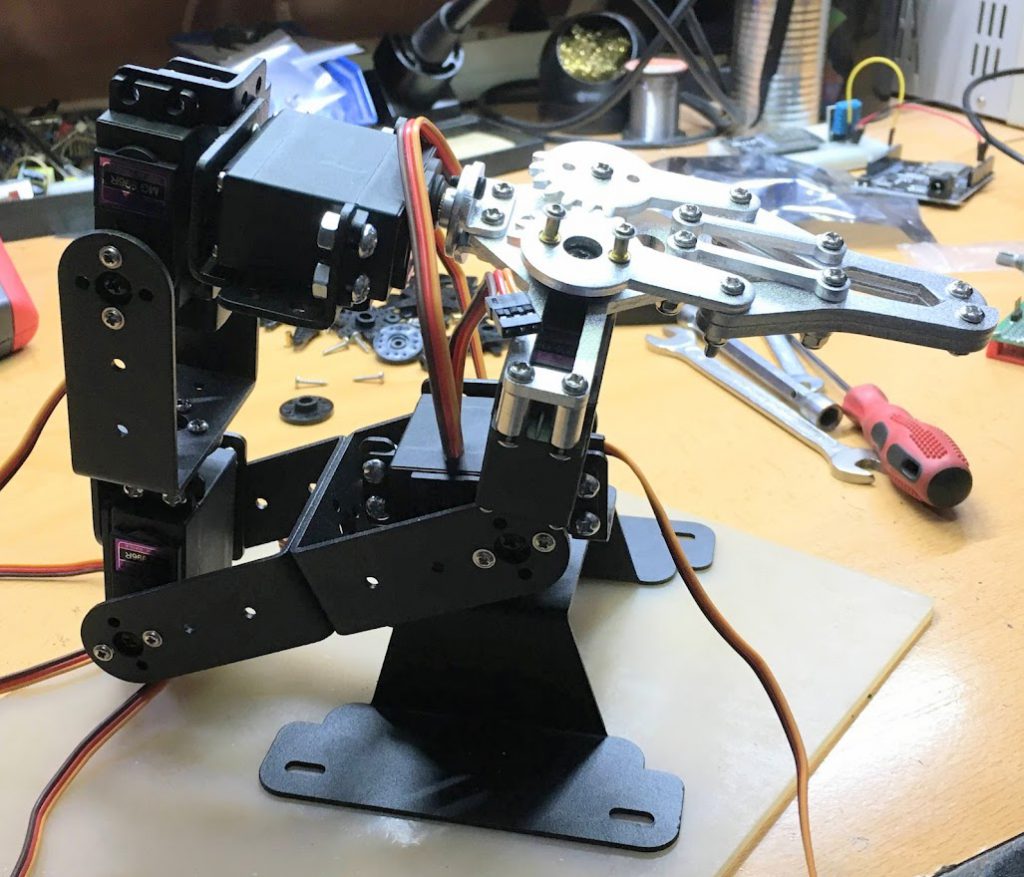
Para unir la garra al resto de la estructura usamos el segundo disco metálico acoplándolo sobre el eje del servo superior.
fijándola con dos tornillos.

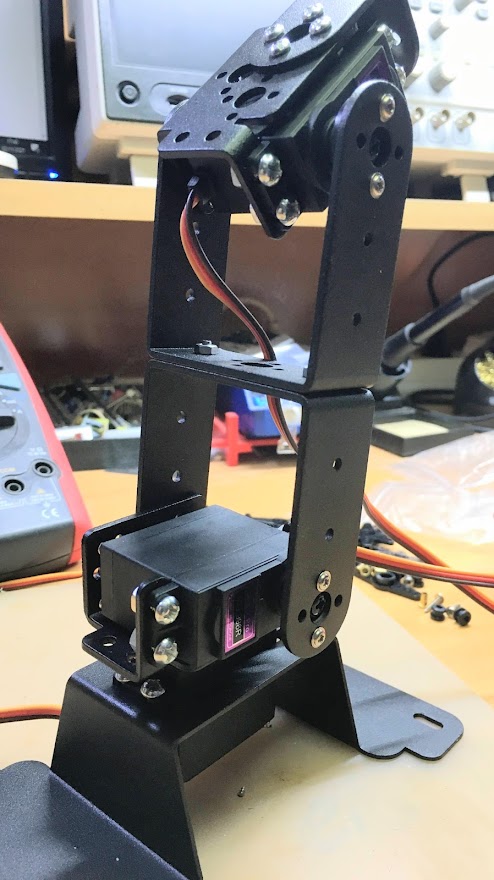
Nuestra estructura está terminada. Ahora deberíamos comprobar que todos los ejes se mueven libremente y tienen el recorrido esperado. Si alguno de los ejes «encuentra tope» antes de que el brazo abarque todo su recorrido, tendremos que desmontar el servo correspondiente, mover el eje a mano y volverlo a montar.
Nos han sobrado un montón de accesorios que vienen con los servos y un montón de tornillos. No problem, no nos hemos equivocado, simplemente los guardamos para otra ocasión.
En otro post entramos en detalle sobre la electrónica.


Comentarios recientes